O BayIEEEmax
Apresentação
O projeto consiste na construção de um robô autônomo capaz de auxiliar os agentes de saúde no processo de triagem por meio da medição de parâmetros do estado de saúde do paciente, tais como pressão sanguínea, oxigenação e temperatura e registrá-los nas respectivas fichas dos pacientes. O robô exibirá perguntas numa tela LCD e também as emitirá pela via sonora através de um alto-falante e receberá as respostas do paciente por meio de comandos de voz.
Durante a execução do projeto será construído um modelo em um software de modelagem 3D para o corpo do robô para posterior impressão 3D. Além disso, será desenvolvida uma placa de circuito impresso responsável por interligar os sensores, atuadores e controlador, bem como retificar a tensão de entrada a fim de disponibilizá-la para o carregamento das baterias. Por fim, a lógica de funcionamento do robô será implementada por meio do framework ROS (Robot Operating System).
A realização do projeto só foi possível graças ao financiamento de $2.000 dólares recebido através de um edital do RAS Chapter Initiative Grant da RAS. Para mais detalhes acesse esse post.
Desenvolvimento
Definição dos Subsistemas
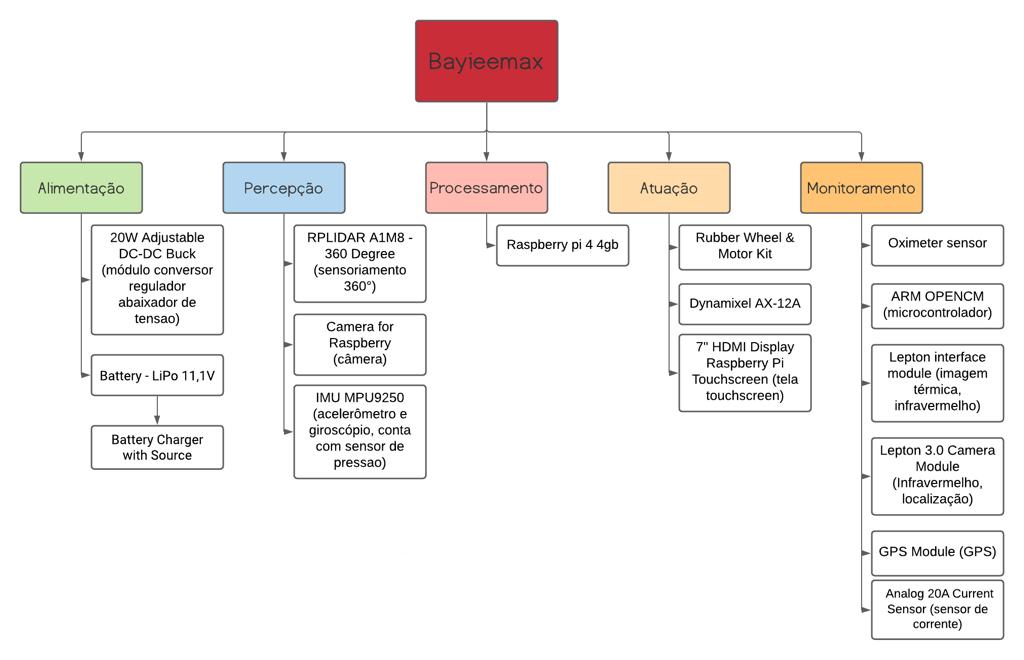
Logo nas primeiras etapas do projeto foi construída uma PBS (quadro de estrutura do projeto) contendo todos os subsistemas essências e quais componentes fariam parte de cada um deles. A imagem abaixo mostra essa estrutura, dividida entre: Alimentação, Percepção, Processamento, Atuação e Monitoramento.
Simulação

O ROS é um framework que possui uma série de ferramentas úteis para o desenvolvimento de robôs. Por exemplo, ele é capaz de simplificar para o usuário o processo de comunicação dos diferentes componentes de um robô, tais como os motores, sensores, baterias e o software através de um sistema baseado em tópicos e mensagens.
O ROS foi adotado como ferramenta neste projeto para a realização das simulação e implementação da lógica do robô por ser um projeto open-source, que possui diversos pacotes já desenvolvidos, suporta de forma nativa as lingugens de programação C++ e Python e também por poder ser carregado diretamente em sistemas embarcados, tal como a Raspberry Pi 4, o controlador que funcionará como o “cérebro” do robô.
Uma grande vantagem da simulação é que podem ser construídos ambientes virtuais complexos semelhantes aos hospitais reais, que seriam de difícil acesso para todos os testes necessários ao longo do projeto. Além disso, falhas podem ser identificadas e melhorias implementadas sem a necessidade de estar com o robô em mãos ou da construção de um campo de trainamento.
Atualmente estamos desenvolvendo a teleoperação, que será usada para fins de testes no robô após a sua montagem, a navegação autônoma e a integração com os sensores que serão usados durante a triagem.
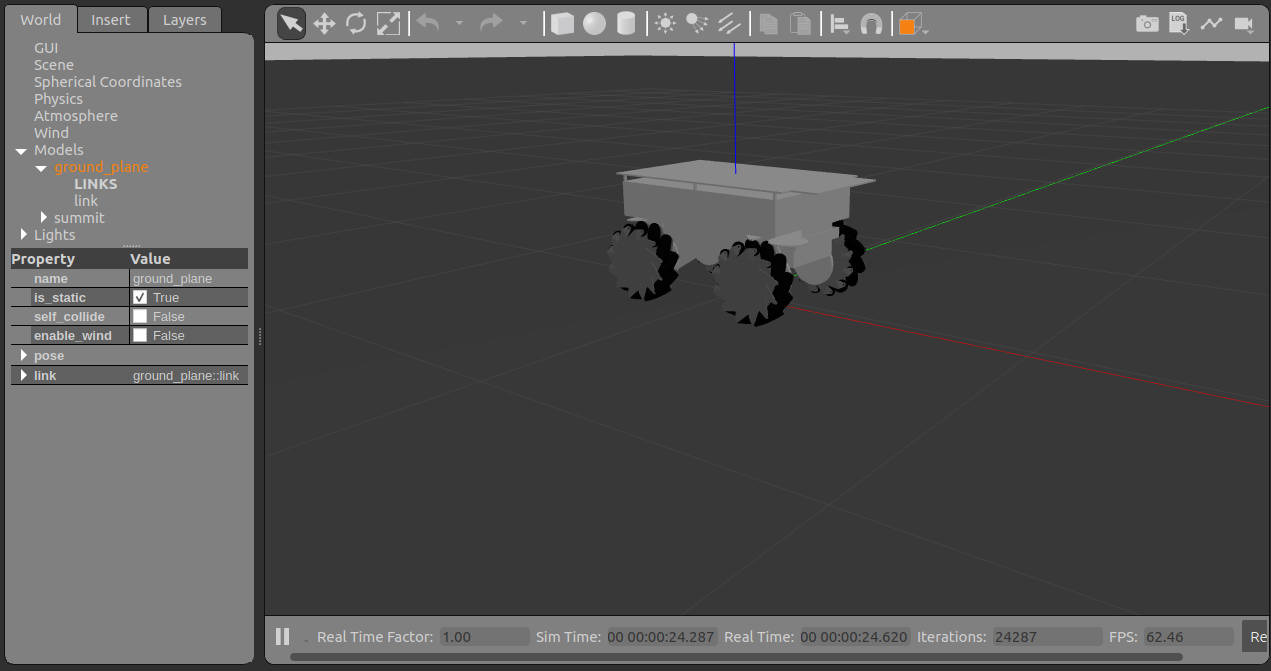
A imagem acima mostra o ambiente de simulação Gazebo com o robô implementado por meio do ROS. Note que foi utilizado um robô retangular genérico apenas para fins de desenvolvimento das funções e que posteriormente será subistituído pelo CAD construído pela equipe.
O uso de rodas omnidirecionais foi adotado para permitir ao robô maior liberdade de movimento, possibilitando inclusive movimentos diagonais, sem a necessidade de rotação ao redor do próprio eixo. A imagem abaixo apresenta um esquema sobre a relação vetorial ligada à este movimento
Descrição da cinemática do movimento omnidirecional (Fonte: TAHERI, H.; QIAO, B.; GHAEMINEZHAD, N. 2015).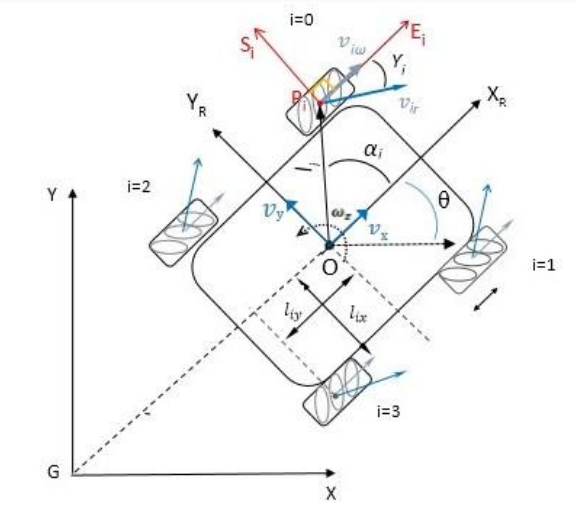
![]() Repositório: ieeecimatec/bayieeemax
Repositório: ieeecimatec/bayieeemax
Eletrônica

KiCad é um programa computacional de código aberto para projeto eletrônico assistido por computador, com o objetivo de facilitar a concepção de layouts e suas conversões para placas de circuito impresso.
O KiCad foi utilizado neste projeto como instrumento para a confecção do circuito impresso (PCB), o qual foi construído por meio da montagem do circuito propriamente dito, colocando componentes essenciais para o funcionamento do robô, e por ser Open Source, permite a utilização de modelos 3Ds e footprints, criados por sua empresa ou usuários desse Software.
A utilização do KiCad permite ao usuário desenvolver um circuito prévio, construindo uma placa que será feita para o funcionamento desejado, com os componentes desejados, evitando gastos com risco de mal posicionamento ou falta de espaço entre componentes. Ademais, as possíveis falhas de conexões do circuito são identificadas durante a construção do mesmo, em que o próprio software te alerta sobre os erros de ligações encontrados.
Hodiernamente, está sendo desenvolvido a placa Main board, possuindo em seu circuito um MicroControlador chamado STM32F103C8T6, que irá se conectar com a Placa Mãe, cujo componente principal é a Raspberry PI 4 Model B, o qual irá monitorar esse Microcontrolador. Dessa maneira, permite o funcionamento dos motores, sensores, GPs e reconhecimento de voz que serão utilizados na triagem médica dos pacientes.
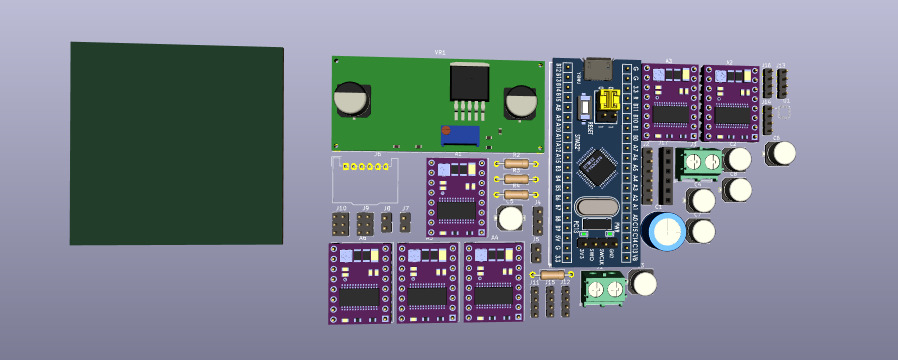
A imagem acima apresenta estágio atual da Main board, com o modelo tridimensional dos componentes utilizados e que serão interligados por meio da placa de circuito impresso. Na imagem abaixo é mostrado o esquemático de ligações do microntrolador BluePill.

![]() Repositório: ieeecimatec/Baiyeeemax_eletronics
Repositório: ieeecimatec/Baiyeeemax_eletronics
Equipe de desenvolvimento
Software
 |
 |
 |
||
|---|---|---|---|---|
Eletro-eletrônica
 |
 |
|
|---|---|---|
CAD
 |
 |
|
|---|---|---|