
O que é o I3E-D3?
O I3E-D3 é o mascote do IEEE CIMATEC, um robô autônomo utilizado também como ferramenta de marketing para nosso Ramo. Além disso, a ideia do projeto é que ele possa ser utilizado pelos voluntários da RAS para o aprendizado de robótica em uma plataforma física, implementando novas funcionalidades ao robô.
Como surgiu?
A ideia do projeto surgiu a partir do I3E-D2, um robô bastante simples (inspirado no R2D2), construído por nós há alguns anos, e apresentado no IEEE DAY 2018. Então, ao fim de 2019, resolvemos projetar um robô mais complexo, autônomo e com mais funcionalidades.
Desenvolvimento
Software
Funcionalidades implementadas:
- Teleoperação: Utilizando um controle Joystick genérico, o D3 pode ser controlado remotamente e navegar pelo ambiente;
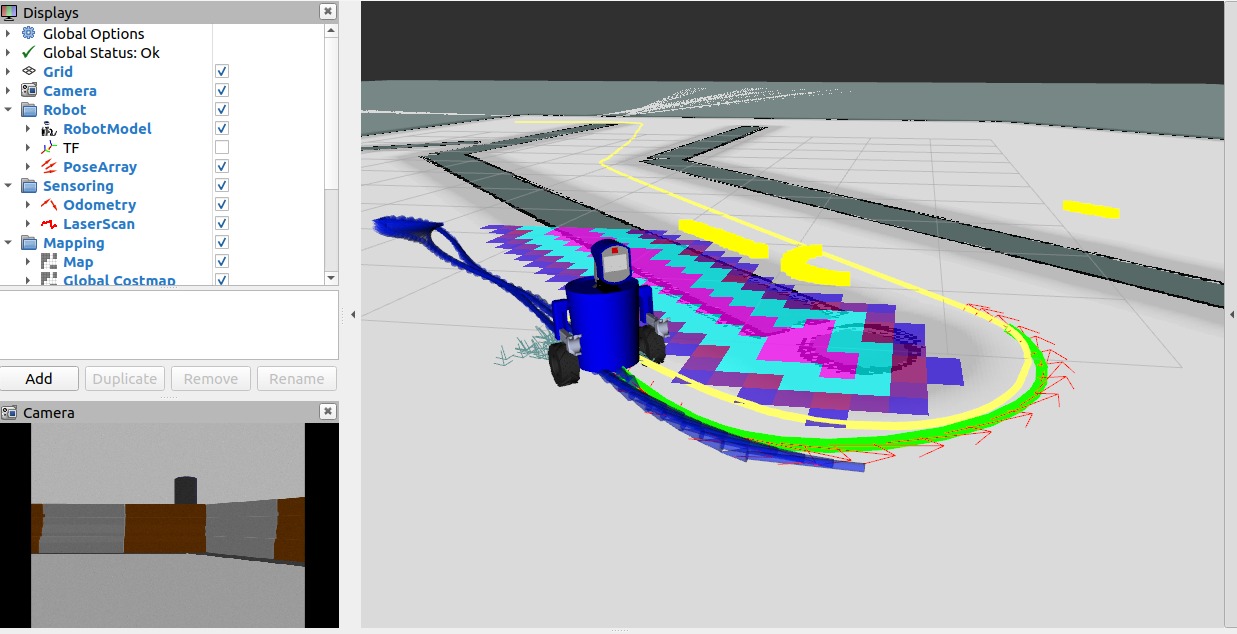
- Localização: Conforme o D3 se move pelo ambiente (seja por navegação autônoma ou por teleoperação), ele é capaz de se localizar em um mapa predefinido, ou mesmo se localizar enquanto mapeia o ambiente, o que é chamado de SLAM - Simultaneous Localization And Mapping;
- Mapeamento: O D3 é capaz de mapear uma região conforme se move por ela. Isso é possível graças ao seu sensor LIDAR, que dá ao robô informações sobre o ambiente ao seu redor;
- Navegação Autônoma: O D3 utiliza a Navigation Stack do ROS para navegar de forma autônoma pelo ambiente. Isso pode ser feito tanto com um mapa predefinido (mapeado por ele mesmo), desviando de possíveis novos obstáculos ou pessoas, que não estavam contidos no mapa inicial, ou até sem nenhum mapa;
- Exploração: A exploração consiste-se em uma navegação autônoma sem um mapa predefinido, de forma que o mapeamento é feito enquanto navega. A exploração termina quando o D3 consegue mapear o ambiente inteiro ao seu redor, salvando o mapa em um arquivo, de forma que possa ser utilizado posteriormente.
![]() Repositório: rascimatec/i3e-d3
Repositório: rascimatec/i3e-d3
![]() Repositório: rascimatec/i3e-d3_bluepill
Repositório: rascimatec/i3e-d3_bluepill
Eletrônica
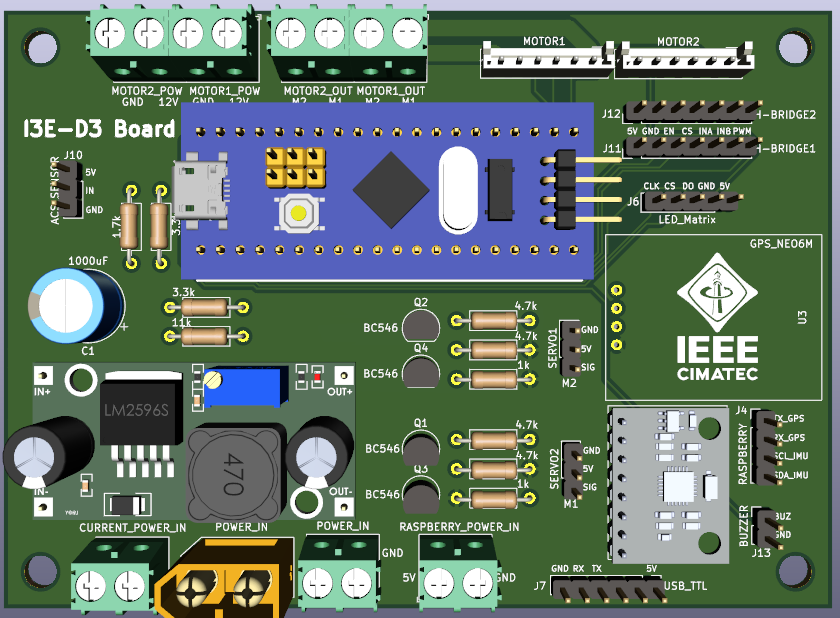 |
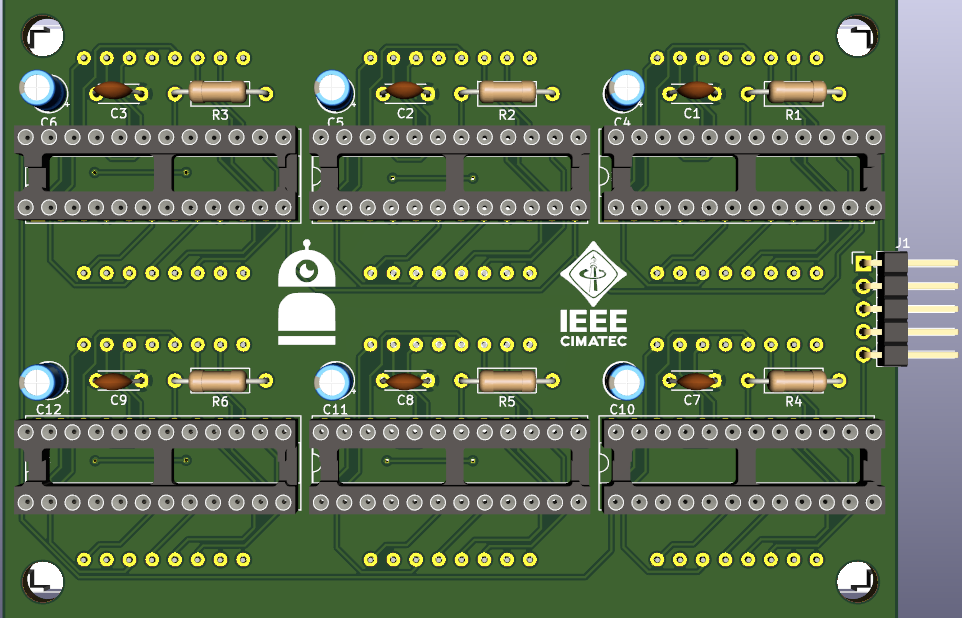
Para a eletrônica do I3E-D3, foram desenvolvidas duas Placas de Circuito Impresso (PCBs): uma placa principal chamada de Main Board, contendo os componentes principais da placa (microcontrolador, entrada para alimentação, conversor DC-DC, conectores para motores e pontes-H, GPS, IMU, e outros), e outra placa chamada de Face Board, contendo os circuitos para funcionamento das matrizes de LED do rosto do robô, que se comunica com a placa principal. O microcontrolador utilizado para o projeto foi o STM32F103C8T6, popularmente conhecido como bluepill. Ele se comunica via Serial com uma Raspberry Pi 3, que é o controlador responsável pelo funcionamento do robô, utilizando o ROS. |
 |
![]() Repositório: rascimatec/i3e-d3_Electronics
Repositório: rascimatec/i3e-d3_Electronics
CAD

![]() Repositório: rascimatec/i3e-d3_CAD
Repositório: rascimatec/i3e-d3_CAD
Resultados obtidos
Projeto finalizado! Demorou, mas conseguimos projetar um robô autônomo com um visual bastante agradável. Como todo projeto, existem pontos de melhoria e sugestões para trabalhos futuros, mas, por enquanto, estamos satisfeitos com o nosso mascote!
Após serem feitas todas as implementações de robótica com o ROS, tornando o I3E-D3 um robô de fato autônomo, foi também feita uma implementação de teleoperação via bluetooth, de forma que qualquer pessoa possa, facilmente, ligar o robô, conectá-lo ao seu celular, e sair andando com ele facilmente, através de um aplicativo, não necessitando de nenhum conhecimento de robótica para isso. Pela facilidade e simplicidade, essa forma de operação do D3 acaba sendo até mais útil em algumas situações.
Após a finalização dos pacotes do I3E-D3, ele foi utilizado, assim como planejado, para que os voluntários da RAS CIMATEC (e até mesmo de outros capítulos) aprendam sobre robótica em uma plataforma completamente funcional, de forma prática. Um dos momentos em que isso foi possível foi durante o Grupo de Estudos de ROS. Durante esse grupo de estudos, muitos dos desafios envolveram a utilização do I3E-D3, de forma que, além de aprender sobre o assunto, os voluntários pudessem ter um contato mais próximo com o nosso mascote, entendendo seu funcionamento.
Além disso, o I3E-D3 teve uma participação mais do que especial no Acolhimento de Calouros 2022, conseguindo a atenção de muitos dos novos alunos do Cimatec, e também das outras Iniciativas Estudantis (confira nosso post!), cumprindo também seu papel de mascote do Ramo e ferramenta de Marketing!
Equipe de desenvolvimento
 |
 |
 |
||
|---|---|---|---|---|
